La UNI/PdR 177:2025 sulle tecnologie no-man entry verrà presentata ad Accadueo con la partecipazione dell’azienda padovana, protagonista del progetto
Le tecnologie robotiche no-man entry saranno al centro del convegno “Progettare Trenchless con il supporto di Norme e Prassi di Riferimento”, in programma il 9 ottobre 2025 ad Accadueo (BolognaFiere, Sala Goccia – Padiglione 25).
Durante l’evento – promosso da IATT in collaborazione con UNI – sarà presentata ufficialmente la Prassi di Riferimento UNI/PdR 177:2025, dedicata a “Manutenzione e aspirazione materiali a basso impatto ambientale in spazi confinati e a rischio esplosione – Tecnologie robotiche no-man entry” (testo completo disponibile sul sito UNI).
Tra gli interventi in programma figura anche Alessandro Gerotto, Amministratore Delegato di Gerotto Federico Srl, che porterà la propria testimonianza come azienda protagonista nella redazione della prassi.

Una prassi che definisce regole e sicurezza per la robotica industriale
La UNI/PdR 177:2025 – pubblicata il 5 agosto 2025 – è il frutto di un lavoro congiunto tra IATT, UNI e le principali realtà del settore, e nasce con l’obiettivo di fornire linee guida tecniche e operative per l’utilizzo sicuro dei robot in ambienti a rischio, come serbatoi, gallerie, condotte e impianti industriali.
Come spiega Edoardo Marangoni, Responsabile Marketing e Comunicazione di Gerotto, nell’articolo pubblicato da UNI “Tecnologie robotiche no-man entry: ecco la UNI/PdR 177”, questa prassi colma un vuoto normativo, “introducendo un linguaggio condiviso che consente a costruttori, utilizzatori e progettisti di operare in modo coerente, tracciabile e sicuro”.
Gerotto in prima linea: dall’innovazione alla normazione
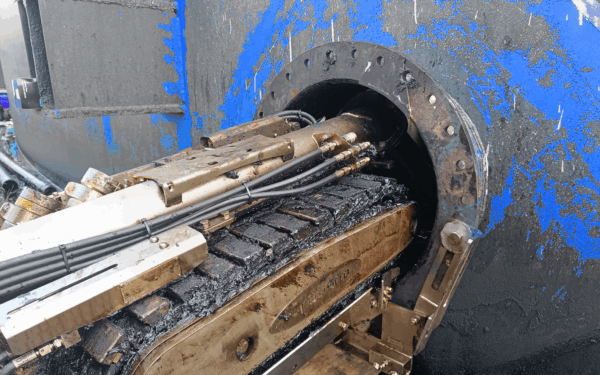
Gerotto Federico Srl, con sede a Campodarsego (Padova), ha partecipato attivamente al gruppo di lavoro, portando un’esperienza ventennale nella progettazione e produzione di robot radiocomandati certificati ATEX, sviluppati per operare in spazi confinati o potenzialmente esplosivi.
«La stesura di questa prassi – commenta Alessandro Gerotto – è una tappa fondamentale per il riconoscimento e la regolamentazione di questi macchinari e del loro utilizzo. Ringrazio IATT che sta facendo un lavoro eccellente per far crescere in Italia la cultura delle tecnologie senza scavo. Ringrazio anche UNI, che è sempre attenta alle innovazioni del mondo manifatturiero e contribuisce a creare una matrice normativa sempre più chiara e funzionale allo sviluppo dell’industria italiana».

Dalla PDR 97/2020 alla PDR 177/2025: un percorso coerente
Non è la prima volta che Gerotto contribuisce allo sviluppo del quadro normativo nazionale.
Nel 2020 l’azienda aveva partecipato alla definizione della UNI/PdR 97:2020, dedicata alle tecnologie di aspirazione pneumatica, avviando un percorso di armonizzazione delle pratiche tecniche oggi proseguito con la PdR 177.
Il nuovo documento descrive nel dettaglio le tipologie di robot, i processi di manutenzione e aspirazione, i protocolli di sicurezza e i requisiti minimi per l’adozione di queste tecnologie in ambito industriale, infrastrutturale e ambientale.
Accadueo 2025: il valore della normazione condivisa
Il convegno di Bologna sarà un’occasione importante per approfondire il ruolo della normazione tecnica come motore di qualità, sicurezza e sostenibilità nelle tecnologie trenchless.
Accanto a UNI e IATT, interverranno rappresentanti del mondo accademico, tecnico e industriale, tra cui Alberto Feletto, project leader della PdR 177, e Alessandro Gerotto, che illustrerà il contributo dell’impresa e la visione futura di un settore in cui robotica e sicurezza convergono per costruire ambienti di lavoro più protetti e più sostenibili.